Die Herausforderung
Wirtschaftliche Produktionsautomatisierung mithilfe von Robotik
Rekuplast ist ein mittelständisches Unternehmen in Familienhand, das in der mittlerweile dritten Generation geführt wird und weltweit tätig ist. 1968 gegründet, produziert Rekuplast zahlreiche Kunststoffprodukte mit höchsten Qualitätsansprüchen für Industriekunden aus so verschiedenen Bereichen wie Agrartechnik, Luft- und Raumfahrt, Maschinen- und Apparatebau sowie die Bauindustrie. Weitere Schwerpunkte liegen bei Produkten für die Medizintechnik und die Automobilindustrie. Die Anforderungen an Kontur, Funktion und Material der Produkte sind vielfältig. Entsprechend sind bei Rekuplast sehr viele unterschiedliche Maschinen im Einsatz, die im Produktionsablauf auch jeweils eigenen Prozessen folgen.
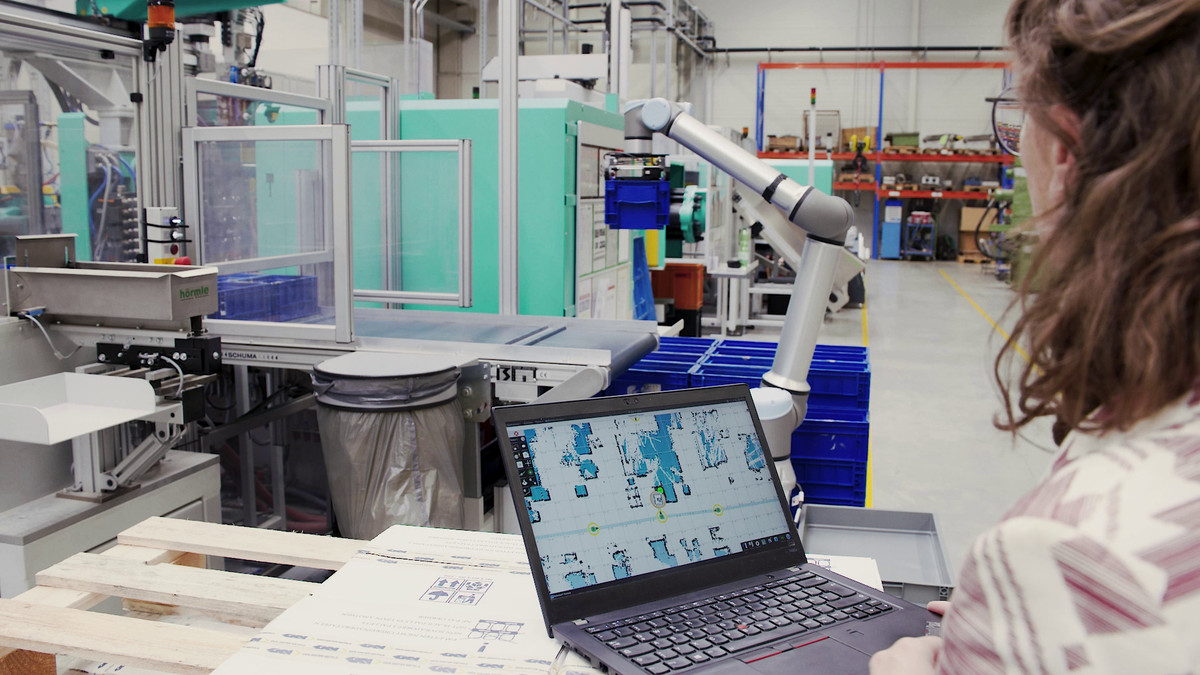
Dennoch gibt es auch Gemeinsamkeiten bei den Abläufen der unterschiedlichen Maschinen. So fällt beispielsweise das Be- und Entladen von Material, das über Kleinladungsträger während des Betriebs an die Maschinen geliefert wird und von den Mitarbeitenden zu entnehmen ist, bei allen Maschinen an. „Das ist eine Tätigkeit, die wiederholt ausgeführt werden muss und die eigentlichen Aufgaben unserer Mitarbeitenden unterbricht“, erläutert Alexander Schrag, Geschäftsführer bei Rekuplast. „Wir hatten schon länger darüber nachgedacht, Robotik in unserem Unternehmen einzuführen. Gemeinsam mit Awesome Technologies haben wir uns die unterschiedlichen Abläufe im Unternehmen angesehen, um Prozesse zu identifizieren, die durch Robotiklösungen effizienter gestaltet werden können. Das ist vor allem bei einfachen, monotonen Tätigkeiten der Fall. Die Automatisierung des Be- und Entladens der Ladungsträger war daher für uns ein idealer Ansatz für unser erstes Robotik-Projekt.“