THE CHALLENGE
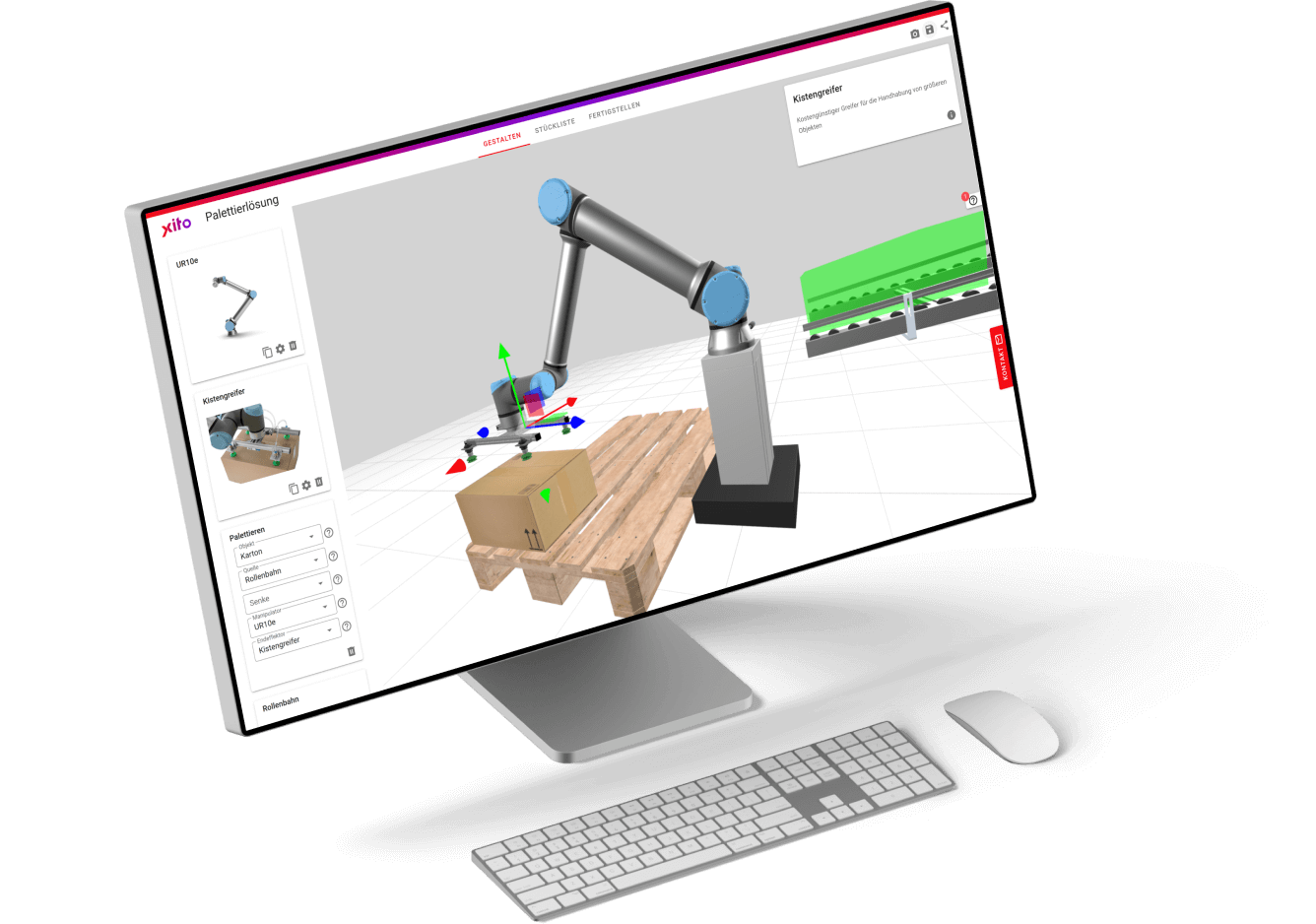
Integration into a system solution for robots
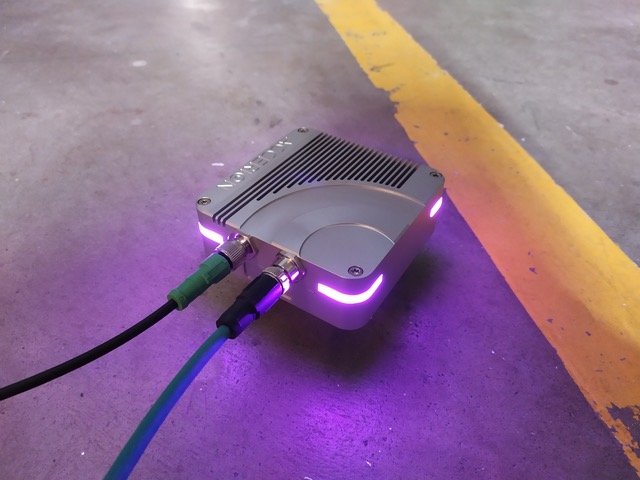
Accerion was founded in 2015 as a start-up in Venlo, the Netherlands, with the aim of developing infrastructure-free positioning technology for autonomous mobile robots. The result is Triton. This sensor component is based on a new concept for determining position in space. Instead of using laser scanners to scan the surroundings or relying on external infrastructure, such as beacons, Triton uses the floor. With the help of a camera, the smallest features on the floor are recorded, and these unique patterns are used to create a kind of fingerprint. This is then compared with a database so that the position can be determined with sub-millimetre precision. The same procedure is used in dynamic environments where people or forklift trucks move or the environment changes.
While dynamics in space pose significant problems for laser-based sensor systems, Triton’s localization remains stable even in dynamic environments. This enables powerful solutions for automated logistics, such as high-precision docking, virtual line tracking and working in large open spaces. The clincher: Everything needed to use Triton fits into a small box. What’s more, neither external building infrastructure, nor any other software or sensors are required. Triton is simple and quick to set up, not to mention inexpensive.
Despite these many advantages, Accerion had to work out how to integrate Triton into robotic software systems. In general, integrating single modules into a complete system is the biggest cost driver when it comes to developing customized robot solutions. Accerion is determined to minimize the work that this entails for its customers, so that Triton can be freely combined with modules from other manufacturers. As Triton is a novel solution to the problem of localization, it needs visibility to attract new customers that are not yet aware of the kind of technology. Triton’s success is therefore heavily dependent on how these challenges can be solved.