Das erste Konzept sah den UR 20 vor, der über eine T-förmige Zuführung die ankommenden Kartons aufnehmen sollte. Immer drei Kartons sollten gleichzeitig mittels Vakuum gegriffen werden, um sie dann auf einer von drei nebeneinanderstehenden Paletten zu platzieren. Je nach Zubehörteil variieren jedoch die Kartonmaße. „Das ist eine Herausforderung, die es
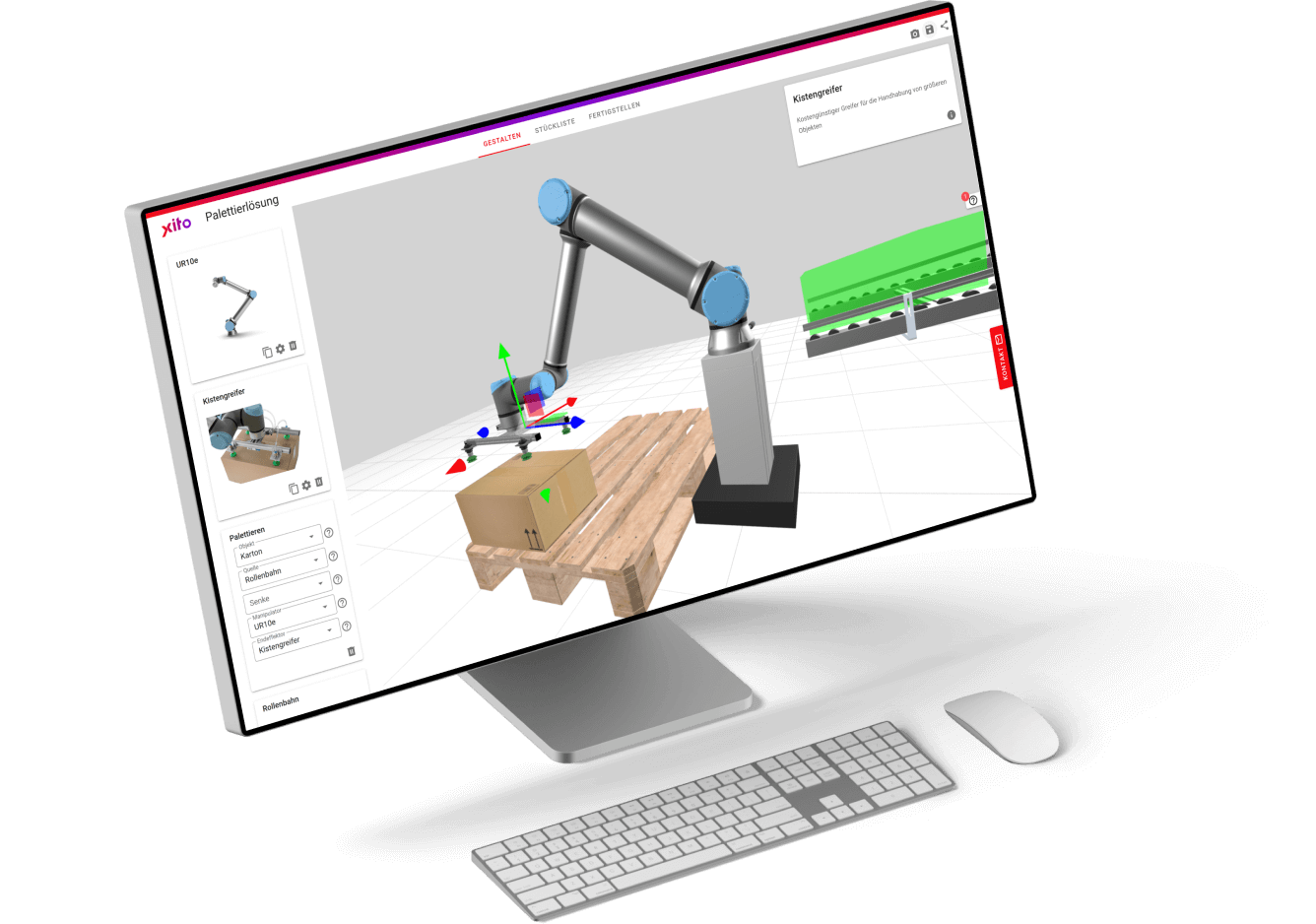
ebenfalls zu berücksichtigen galt. Hier kommt die Wandlungsfähigkeit ins Spiel.“ Denn vor diesem Hintergrund waren verschiedene Palettier-Schemata und ein anderes Greifen der Kartonagen erforderlich. Kanber spezifizierte verschiedene Palettier-Schemata. Über das Programm kann er intuitiv und wechselnd kommunizieren, auf welcher Rollenbahn welche Kartongröße durch den Prozess läuft. Der Roboter muss die verschiedenen Kartonagen erkennen und anhand der jeweiligen Schemata zuverlässig palettieren, da die Schichtmuster bei den beiden Kartontypen unterschiedlich sind.
Mit der XITO-Plattform habe man alle Anforderungen zur vollsten Zufriedenheit realisiert. „Wir können vier Programme abspielen und die beiden Rollenbahnen entsprechend mit den variierenden Kartons beschicken,“ erklärt Kanber. „Und die Kollegen freuen sich über diese ergonomische Optimierung, da sie jetzt nur noch wiegen müssen. Das Aufstapeln, Greifen und Palettieren übernimmt der Roboter.“